Title here
Summary here
Interrupts, System Calls, and Modes of Operation
Modern Operating Systems are interrupt-driven, meaning they rely on interrupts to perform tasks. If there are no I/O devices to service or no user requests, the OS remains idle, waiting for events to occur.
An interrupt is a signal to the processor indicating that an event has occurred, prompting the OS to take specific actions.
A trap (or exception) is a software-generated interrupt triggered by errors (e.g., division by zero, invalid memory access) or by a user program requesting an operating system service.
Both traps and interrupts allow the operating system to take control of the processor but are triggered differently and serve distinct purposes:
Interrupts are hardware-managed and often require privileged instructions, while traps can be triggered by user programs for system calls but cannot directly cause interrupts.
| Feature | Interrupt | Trap (Exception) |
|---|---|---|
| Trigger | Hardware event (asynchronous) | Software event (synchronous) |
| Cause | External devices (I/O, timer, etc.) | Program errors or system calls (e.g., divide by zero, invalid memory access) |
| Control Flow | OS takes control to handle the event | OS takes control via a system call or error during program execution |
| Handling | Handled by service routines for hardware events | Handled by error handling or system service routines |
For each type of interrupt, the OS contains specific code that determines the appropriate action. The OS uses an Interrupt Service Routine (ISR) to handle interrupts when they occur.
Since both the OS and users share the hardware and software resources, any error in a user program should only affect that particular program, not the entire system. However, issues such as infinite loops or erroneous programs modifying data from other programs can cause system-wide problems.
A properly designed OS ensures that a faulty or malicious program does not negatively affect other running programs or the OS itself.
To protect the OS from errant user programs and vice versa, the OS operates in two main modes: User Mode and Kernel Mode (also called system mode, privileged mode, or supervisor mode).
A mode bit is added to the CPU to indicate the current mode of operation. This dual-mode operation helps protect the OS by restricting certain instructions, called privileged instructions, to Kernel Mode.
Examples of privileged instructions:
Some CPU’s support more than two modes of operation.
For example, systems supporting virtualization may have a mode for the Virtual Machine Manager (VMM) that has more privileges than user programs to create virtual machines and to change the state of CPU but fewer privileges than the Kernel.
CPU’s like the Intel 64 family support privilege levels for virtualization, but they do not have a separate mode specifically for virtualization.
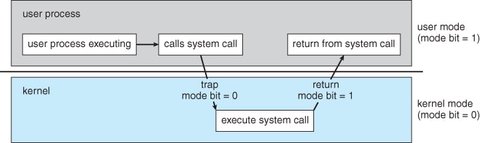
A System Call is a mechanism that allows a user program to request services from the OS to perform tasks on the user program’s behalf, typically involving privileged operations that are otherwise restricted.
System calls are usually implemented as traps that transfer control to a specific location in the interrupt vector.
Control Flow of a System call
Example in MIPS: A specific syscall instruction is used to invoke a system call.
Once hardware protection like mode bit is in place, it detects errors that violate modes.
When the system is in Kernel Mode, it can detect errors that violate the operating modes, such as illegal instruction execution or unauthorized memory access. These errors are handled by the OS:
The absence of hardware-supported dual-mode operation can lead to serious issues. For instance, MS-DOS, which was designed for the Intel 8088 without a mode bit, allowed user programs to overwrite the OS and access hardware directly, resulting in potential system crashes.
Timer is a component that can interrupt the system after a fixed or variable period, preventing user programs from running indefinitely. It is a critical component in the OS to maintain control over execution.
OS ensures that timer is set before transferring control to a user program. If the timer interrupts, control is passed back to the OS, which can either treat the interrupt as an error or extend the program’s time.
Instructions that modify the content of the timer are privileged.
Example Timer Configuration:
A 10-bit counter with a 1-millisecond clock allows for interrupts at intervals ranging from 1 millisecond to 1,024 milliseconds (1 second).