Title here
Summary here
Answer :
A process is an active instance of a program in execution. While a program is a passive set of instructions stored on disk (such as an executable file). A process includes everything needed to execute those instructions — including memory, CPU registers, and input/output resources.
When a program is loaded into memory for execution, it becomes a process and is assigned a unique Process ID (PID) by the operating system.
A process typically consists of the following memory sections:
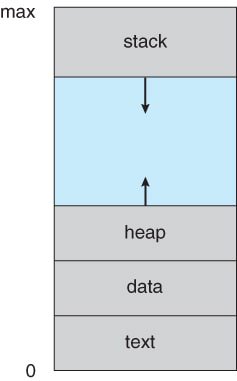
Multiple processes can be associated with the same program, each process is considered a separate execution sequence.
In these cases, each process is independent, even though their text sections (program code) may be identical. The data, heap, and stack sections will differ for each process.
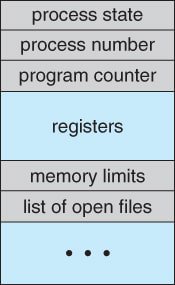
The Process Control Block (PCB) is a data structure maintained by the operating system to store all information about a process. Every process in an OS is represented by a PCB, also known as a Task Control Block.
The PCB holds important information related to a process:
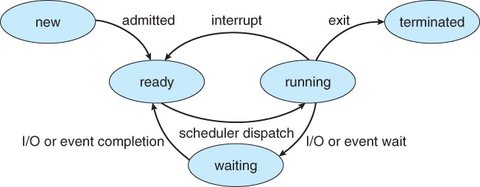
Process State: Current status of the process (e.g., New, Ready, Running, Waiting, Terminated).
Process ID (PID): Unique identifier for the process.
Program Counter: Address of the next instruction to execute in that process.
CPU Registers: Contents of all registers (general-purpose and special-purpose) the process uses. Snapshot of register values (used to restore process state during context switches).
CPU Scheduling Information: Priority of the process, scheduling queue pointers, and other parameters used by the scheduler.
Memory Management Information: Includes base/limit registers, page tables, segment tables depending on the memory system used.
Accounting Information: CPU usage, execution time, time limits, process start time, and owner/user ID.
I/O Status Information: List of allocated I/O devices, open files, and I/O requests.
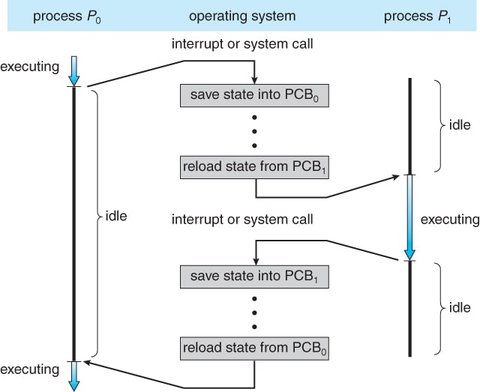
When an interrupt occurs, OS saves the PCB of a process when switching out of it (context switch), and restores it when the process resumes once the interrupt is handled, ensuring smooth multitasking and process isolation.
Answer :
A process state represents the current activity of a process. A process transitions between various states during its lifecycle:
Note:
Answer :
The goal of multiprogramming is to improve CPU utilization by ensuring the CPU always has a process to execute. It allows multiple processes to reside in memory simultaneously so that when one process is waiting (e.g., for I/O), the CPU can switch to another ready process.
In time-sharing systems, the objective is to enable multiple users to interact with their processes concurrently. The operating system rapidly switches the CPU between user processes, providing the illusion that each user has their own dedicated system. This is achieved through frequent context switches, allowing real-time user interaction with running programs.
Whenever a running process enters a waiting state (e.g., for I/O), the CPU Scheduler (short-term scheduler) selects another process from the ready queue to execute. This mechanism ensures efficient CPU usage and system responsiveness.
If the number of processes exceeds the CPU’s capacity, some must wait their turn, leading to queueing and scheduling delays. Proper scheduling ensures fairness and efficient resource use.
In an operating system, various queues manage the state and progress of processes:
Job Queue : When a user submits a process for execution, it is added to the job queue. Contains all processes in the system.
Ready Queue : Contains processes that are in main memory and ready to execute. The CPU scheduler picks processes from this queue based on the scheduling algorithm.
Device Queue: Each I/O device has a separate device queue. If a process requests an I/O operation and the device is busy, it waits in the corresponding device queue.
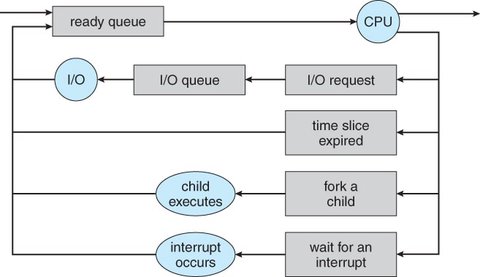
A process typically executes in a cycle of CPU bursts and I/O bursts until it terminates:
I/O-bound processes: Spend more time on I/O than computation. These have short CPU bursts and frequent I/O operations.
CPU-bound processes: Perform intensive computation with long CPU bursts (arithmetic computations, logical operations, and program execution) and infrequent I/O.
This cycle allows the operating system to balance workloads and maximize device utilization.
Schedulers are responsible for selecting processes at various stages of execution:
Long-Term Scheduler (Job Scheduler) : Determines and selects processes and loads them into the system memory for processing. Controls the degree of multiprogramming (i.e., how many processes are loaded in memory). It may favor a mix of I/O-bound and CPU-bound processes for optimal resource use.
Short-Term Scheduler (CPU Scheduler) : When the CPU is idle, Selects from the ready queue the process that will execute next. Executes frequently (milliseconds) to ensure fast and fair CPU allocation. Must be fast and efficient due to its frequent execution.
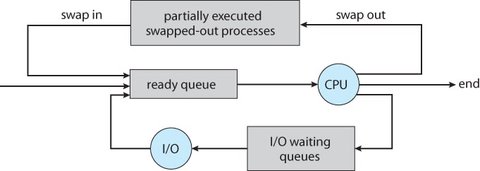
Medium-Term Scheduling : In multiprogramming systems, sometimes it’s beneficial to temporarily remove processes from main memory (swapping them to disk) to reduce the level of multiprogramming and reduce the load on system and free up memory.
Swapped-out processes are moved to secondary storage and reloaded later into memory and continue execution from where they left off, helping balance memory load and system performance.
A context switch is the process of saving the state of a currently running process and loading the state of another process. This allows multiple processes to share the CPU effectively.
Key Elements of Context Switching:
A context switch occurs when the operating system switches from one process to another. Context switching happens frequently as the CPU alternates between tasks.
Overhead: Context switches add overhead because the system must spend time saving and loading process states, no useful work is done while switching.
Factors Affecting Speed : The time taken for a context switch can vary depending on system factors, such as memory access speed, the number of registers involved. System architecture and optimization of the OS kernel.
The dispatcher is a system component that is responsible for transferring control of the CPU to the process selected by the short-term scheduler.
The dispatcher performs operations like context switching, switching the CPU from kernel mode to user mode, and Starts execution at the correct program counter for the selected process..
Dispatch Latency is the time taken to perform a context switch and start executing a new process. To stop one process and start another. This latency is crucial for optimizing process scheduling efficiency.
Answer :
To compare different scheduling algorithms, the following criteria are considered:
CPU Utilization : The percentage of time the CPU is actively working (not idle). The goal is to maximize CPU Utilization (e.g., from 40% to 90%). A well-utilized CPU means the system is efficiently using hardware resources.
Throughput : The number of processes completed per unit of time (processes per second), indicating system efficiency. Goal is to Maximize throughput. Higher throughput implies better overall system productivity.
Turnaround Time : The total time taken for a process to complete — from submission to completion including the waiting time. Goal is to Minimize turnaround time. Lower turnaround time means faster job completion, which is essential for batch systems.
Turnaround Time = Completion Time - Arrival TimeWaiting Time = Turnaround Time - CPU Burst TimeOptimization goals:
CPU scheduling involves determining which process from the ready queue should be allocated CPU time.
The FCFS scheduling algorithm allocates CPU to processes in the order they arrive, using a FIFO queue. The process at the front of the queue gets the CPU, and when it completes, it is removed.
Drawbacks of FCFS :
Monopolization of CPU : A CPU-bound process consumes the CPU while I/O-bound processes, which could proceed with little CPU time, wait. This leads to inefficient use of I/O devices.
Transition and Idle CPU : Once a CPU-bound process finishes its burst, it moves to the I/O queue, causing idle periods for the CPU while I/O-bound processes complete their tasks.
Convoy Effect : A long CPU-bound process delays smaller, I/O-bound processes, causing inefficient use of resources.
The Shortest Job First (SJF) scheduling algorithm assigns the CPU to the process with the shortest CPU burst. If two processes have the same burst, FCFS is used to break the tie.
Nonpreemptive SJF: The process that starts executing runs until it completes, even if another process arrives with a shorter burst.
Preemptive SJF: If a process arrives with a shorter CPU burst than the currently running process, the CPU is preempted and allocated to the new process. This is also known as Shortest-Remaining-Time-First (SRTF) scheduling.
The Priority Scheduling algorithm allocates CPU time based on process priority. The process with the highest priority gets the CPU. If two processes have the same priority, FCFS is used.
Preemptive Priority Scheduling: A higher-priority process preempts a lower-priority process that is already running.
Nonpreemptive Priority Scheduling: A higher-priority process waits until the current process completes or blocks before it executes.
Issues:
Indefinite Blocking (Starvation): Low-priority processes may never get to execute because higher-priority processes continuously preempt them.
Aging is used to solve starvation by gradually increasing the priority of long-waiting processes, ensuring that they eventually get executed.
The Round-Robin (RR) scheduling algorithm is a variant of FCFS, but with preemption.
The Ready Queue functions as a circular queue. The CPU scheduler allocates the CPU to each process for a time quantum. After the time quantum ends, the process is preempted and placed back at the end of the ready queue.
This approach prevents any single process from monopolizing the CPU, allowing for better time-sharing.
| Process | Priority | Arrival Time (ms) | Burst Time (ms) |
|---|---|---|---|
| P1 | 2 | 0 | 10 |
| P2 | 1 | 2 | 4 |
| P3 | 4 | 0 | 2 |
| P4 | 1 | 5 | 1 |
| P5 | 3 | 4 | 6 |
The lowest number in priority indicates the highest priority of the process.
i) Draw Gantt charts for SJF and Preemptive-Priority scheduling algorithms.
ii) Calculate the waiting time and average waiting time for each algorithm.
iii) Calculate the turnaround time and average turnaround time for each algorithm.
iv) Which is the more efficient algorithm?
| Process | Arrival Time (ms) | CPU Time (ms) |
|---|---|---|
| P1 | 0 | 3 |
| P2 | 2 | 3 |
| P3 | 3 | 5 |
| P4 | 4 | 2 |
| P5 | 8 | 3 |
i) Draw the Gantt chart for the SJF algorithm.
ii) Calculate the average waiting and turnaround times for FCFS and Round-Robin scheduling (time slice = 1 ms).
| Process | Burst Time | Priority |
|---|---|---|
| P1 | 8 | 4 |
| P2 | 2 | 1 |
| P3 | 2 | 3 |
| P4 | 3 | 3 |
| P5 | 5 | 2 |
i) Draw Gantt charts for the following scheduling algorithms:
ii) Calculate the waiting time of each process for each scheduling algorithm. Also, find the average waiting time for each algorithm.
iii) Calculate the turnaround time of each process for each scheduling algorithm. Also, find the average turnaround time for each algorithm.
| Process | Burst Time |
|---|---|
| P0 | 80 |
| P1 | 20 |
| P2 | 10 |
| P3 | 20 |
| P4 | 50 |
i) Draw a Gantt chart for FCFS scheduling.
ii) Calculate the turnaround time for process P3.
iii) Determine the average waiting time.
| Job | Estimated Time | Priority |
|---|---|---|
| A | 10 | 3 |
| B | 6 | 5 |
| C | 2 | 2 |
| D | 4 | 1 |
| E | 8 | 4 |
i) Draw Gantt charts for Round Robin (Quantum = 5 ms), Priority Scheduling, and SJF algorithms.
ii) Determine average waiting and turnaround times for each algorithm.