Title here
Summary here
Process synchronization refers to the coordination of the execution of processes that share resources, in order to maintain consistency and avoid conflicts.
A common issue that arises is race condition, which occurs when multiple processes concurrently access and modify shared data, leading to inconsistent, data corruption or incorrect results, depending on the timing of the operations.
Therefore, synchronization mechanisms are required to ensure correct process behavior and data integrity.
Answer :
In a system with multiple processes (P0, P1, …, Pn−1), each process may include a segment of code called the critical section, where it accesses or modifies shared resources such as variables, files, or data structures.
The Critical Section Problem is to design a mechanism that ensures only one process can execute in its critical section at a time (no two processes execute their critical sections simultaneously), in order to avoid race conditions and ensure data consistency.
Each process follows a structure that typically consists of four sections:
A valid solution to the critical-section problem must satisfy three essential conditions:
Mutual Exclusion : Only one process can be in its critical section at any given time. If one process is executing in its critical section, all other processes must be prevented from entering theirs.
Progress : If no process is currently in its critical section and there are one or more processes that wish to enter their critical sections, the selection of the next process to enter the critical section cannot be postponed indefinitely. Only processes that are not in their remainder sections should be involved in the decision.
Bounded Waiting : There must be a bound on the number of times other processes can enter their critical sections after a process has made a request to enter its critical section and before that request is granted. This condition ensures that no process has to wait indefinitely (prevents starvation).
These requirements ensure that the system maintains consistency, avoids deadlock, and allows fair access to shared resources among competing processes.
Answer :
Interprocess Communication (IPC) refers to the mechanism that allows processes to communicate and coordinate their actions when running concurrently. IPC is essential in systems where multiple processes must cooperate and share data.
Processes can be classified as:
Independent Processes: These do not share data or state with other processes and function without affecting or being affected by others. They operate in isolation and do not require synchronization with other processes.
Cooperating Processes: These share data with other processes and, therefore, require coordination and communication to ensure consistency and correct operation. IPC is required to enable cooperating processes to exchange information and synchronize execution.
Providing an environment for process cooperation allows the operating system to support:
Information Sharing : Enables Processes to access and modify shared data between several users needing it.
Computation Speedup : Large tasks can be divided among multiple processes to run concurrently, improving overall performance by distributed workloads.
Modularity : Large systems can be broken into smaller, independent processes that are easier to manage and understand and maintain. IPC allow processes to collaborate without needing them to be tightly coupled.
Convenience : Cooperative multitasking allows users to run multiple applications at the same time, improving system usability and responsiveness.
There are two primary models of IPC:
Shared Memory:
Message Passing:
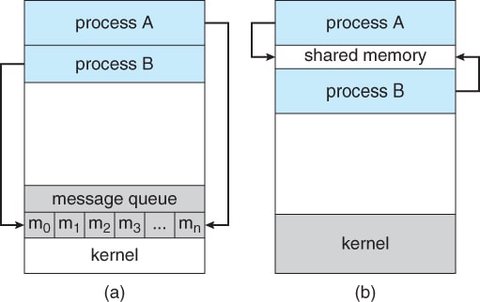
Message passing allows processes to communicate and synchronize without sharing memory (same address space).
Message passing typically provides at least two operations by using system calls like send() and recieve():
send(message): Send a message to another process.receive(message): Receive a message from another process.This approach is particularly helpful in distributed systems where processes run on separate machines connected by a network.
Producer-Consumer Problem Using Message Passing:
send() operation.receive() operation.Message passing systems can be implemented using different methods, including:
Direct Communication: Processes (Sender or Reciever) explicitly name each other during communication and messages are directly sent to process.
send(P, message) – Send message to process P.receive(Q, message) – Receive message from process Q.Can be symmetric addressing (both sender and receiver know each other) or asymmetric addressing (only sender or receiver identifies the other).
send(P, message) - Send a message to process P.receive(id, message) - Receive a message from any process, with id set to the name of the sender.Tends to create tighter coupling between processes, reducing flexibility.
Indirect Communication: Processes communicate via mailboxes or ports where messages are placed and retrieved, not directly with each other.
send(mailbox, message) – Send message to a mailbox.receive(mailbox, message) – Receive message from a mailbox.Processes are more loosely coupled, offering more flexibility and scalability, especially in dynamic distributed systems spread across different machines.
Synchronous Communication (Blocking): The sender waits until the message is received. The receiver waits until a message is available. Suitable for situations where synchronization is required.
Asynchronous Communication (Non-blocking): The sender sends the message and continues without waiting for acknowledgement. The receiver checks for messages and continues execution.
Asynchronous communication is typically more efficient but requires additional mechanisms (like callback functions or notifications) to ensure proper synchronization.
In the Producer-Consumer problem:
Messages exchanged between processes are temporarily stored in queues known as message buffers. The buffering behavior depends how it is implemented in the system:
Zero-Capacity Buffer (No Buffering): No message is stored. Sender blocked and must wait for the receiver to be ready.
Bounded-Capacity Buffer: Buffer has a limited size. Sender must wait if the buffer is full. Consumer must wait if the buffer is empty.
Unbounded-Capacity Buffer: Theoretically infinite buffer. The sender never waits, but this is not practical for real systems.
Systems with bounded or unbounded queues are referred to as automatic buffering systems, while a system with a zero-capacity queue is referred to as no buffering.
One common problem in cooperative processes is the Producer-Consumer problem.
For both processes to run concurrently, they need a shared buffer — a region of memory where the producer can place data, and the consumer can retrieve it.
Synchronization between the producer and consumer is crucial to prevent problems like:
To avoid these issues, synchronization mechanisms such as mutexes, semaphores, or monitors are commonly used to ensure mutual exclusion and avoid race conditions.
Answer :
A semaphore is an synchronization tool (integer variable) that manages access of multiple processes to a shared resource.
Apart from being initialized, the semaphore can only be accessed using two operations: wait() and signal(), both of which are atomic (indivisible) operations.
wait() operation checks the value of the semaphore. If the value is greater than 0, it decrements the value and allows the process to proceed. If the value is 0 or less, the process will wait (i.e., it will keep checking the value until it can proceed). This prevents the process from proceeding if resources are unavailable.wait(S)
{
while (S <= 0)
; // busy wait
S--;
}signal() operation increments the semaphore value, signaling that a resource has been released or an event has occurred. This operation allows waiting processes to continue if necessary.signal(S)
{
S++;
}Both the wait() and signal() operations modify the semaphore’s value. These operations must be executed atomically—meaning no other process can change the semaphore’s value while it’s being modified.
A binary semaphore is a special type of semaphore that can only have two values: 0 and 1. It is often used for mutual exclusion to ensure that only one process can access a critical section at a time.
A counting semaphore is a synchronization tool that can hold a non-negative integer value representing the number of available instances of a particular resource.
Consider five philosophers who spend their lives thinking and eating. These philosophers share a circular table with five chairs, each belonging to one philosopher. In the center of the table is a bowl of rice, and five chopsticks are laid out for use.
This scenario is a simple model for the problem of allocating resources (chopsticks) among competing processes (philosophers) in a deadlock-free and starvation-free manner.
Challenges:
One straightforward solution involves representing each chopstick with a semaphore. The philosopher attempts to grab a chopstick by executing a wait() operation on the corresponding semaphore. When finished eating, she releases the chopsticks by executing the signal() operation on the respective semaphores.
Shared Data:
semaphore chopstick[5];
// Array of semaphores for chopsticks
chopstick are initialized to 1, representing that each chopstick is available.Philosopher Process:
do {
wait(chopstick[i]);
// Pick up left chopstick
wait(chopstick[(i+1) % 5]);
// Pick up right chopstick
/* Eat for a while */
signal(chopstick[i]);
// Put down left chopstick
signal(chopstick[(i+1) % 5]);
// Put down right chopstick
/* Think for a while */
} while (true);